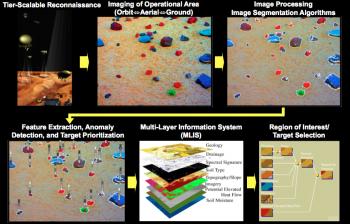













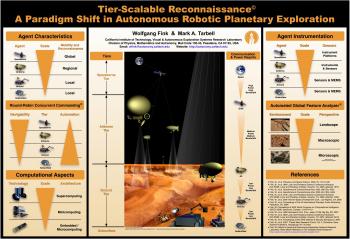
A fundamentally new scientific mission concept for remote planetary atmospheric, surface, and subsurface reconnaissance is replacing the engineering and safety constrained mission designs of the past, allowing for optimal acquisition of geologic, paleohydrologic, paleoclimatic, and possible astrobiologic information of Mars and other extraterrestrial targets. Traditional missions have performed local ground-level reconnaissance through rovers and immobile landers, or global mapping performed by an orbiter. The former is safety and engineering constrained, affording limited detailed reconnaissance of a single site at the expense of a regional understanding, while the latter returns immense datasets, often overlooking detailed information of local and regional significance. The ‘‘Tier-Scalable Reconnaissance’’ paradigm, originated by Dr. Wolfgang Fink at the Visual and Autonomous Exploration Systems Research Laboratory at Caltech and his collaborators (PSS 2005, see Publications), integrates multi-tier (orbit <=> atmosphere <=> ground/subsurface) and multi-agent (orbiter <=> blimps <=> rovers/landers/drills/sensorwebs) hierarchical mission architectures, not only introducing mission redundancy and safety, but enabling and optimizing intelligent, unconstrained, and distributed science-driven exploration of prime locations on Mars and elsewhere, allowing for increased science return, and paving the way towards fully autonomous robotic missions.
[Issued patent(s): U.S. 6,990,406, U.S. 7,734,063, and U.S. 7,742,845]
Sponsor(s):