![]()


















AGFA: (Airborne) Automated Global Feature Analyzer
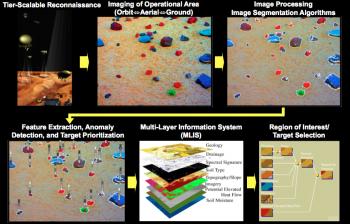
For the purposes of space flight, reconnaissance field geologists have trained to become astronauts. However, the initial forays to Mars and other planetary bodies have been done by purely robotic craft. Therefore, training and equipping a robotic craft with the sensory and cognitive capabilities of a field geologist to form a science craft is a necessary prerequisite. Numerous steps are necessary in order for a science craft to be able to map, analyze, and characterize a geologic field site, as well as effectively formulate working hypotheses. The Automated Global Feature Analyzer (AGFA), originated by Fink at Caltech and his collaborators in 2001, is an automatic and feature-driven target characterization system that operates in an imaged operational area, such as a geologic field site on a remote planetary surface. AGFA performs automated target identification and detection through segmentation, providing for feature extraction, classification, and prioritization within mapped or imaged operational areas at different length scales and resolutions, depending on the vantage point (e.g., spaceborne, airborne, or ground). AGFA extracts features such as target size, color, albedo, vesicularity, and angularity. Based on the extracted features, AGFA summarizes the mapped operational area numerically and flags targets of “interest”, i.e., targets that exhibit sufficient anomaly within the feature space. AGFA enables automated science analysis aboard robotic spacecraft, and, embedded in tier-scalable reconnaissance mission architectures, is a driver of future intelligent and autonomous robotic planetary exploration.
[Issued patent(s): U.S. 9,122,956 and U.S. 9,424,489]
Sponsor(s):
