![]()


















μAVS^2: Portable Artificial Vision Support System

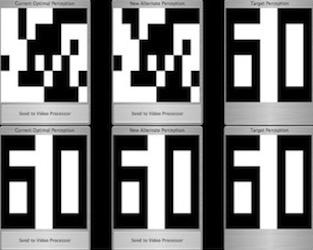
It is difficult to predict exactly what blind subjects with camera-driven visual prostheses (e.g., retinal implants) may be able to perceive. Thus, it is prudent to offer them a wide variety of image processing filters and the capability to engage these filters repeatedly in any user-defined order to enhance their visual perception. To attain true portability, we employed a commercial-off-the-shelf, battery-powered, general purpose Linux microprocessor platform to create the Microcomputer-based Artificial Vision Support System, μAVS2, for real-time image processing. Truly standalone, μAVS2 is smaller than a deck of playing cards, lightweight, fast, and equipped with USB, RS-232, and Ethernet interfaces. Image processing filters on μAVS2 operate in a user-defined linear sequential-loop fashion, resulting in vastly reduced memory and CPU requirements during execution. μAVS2 imports raw video frames from a USB or IP camera, performs image processing, and issues the processed data over an outbound Internet TCP/IP or RS-232 connection to the visual prosthesis system. Hence, μAVS2 affords users of current and future visual prostheses independent mobility and the capability to customize the visual perception generated. Additionally, μAVS2 can easily be reconfigured for other prosthetic systems.
Sponsor(s):
